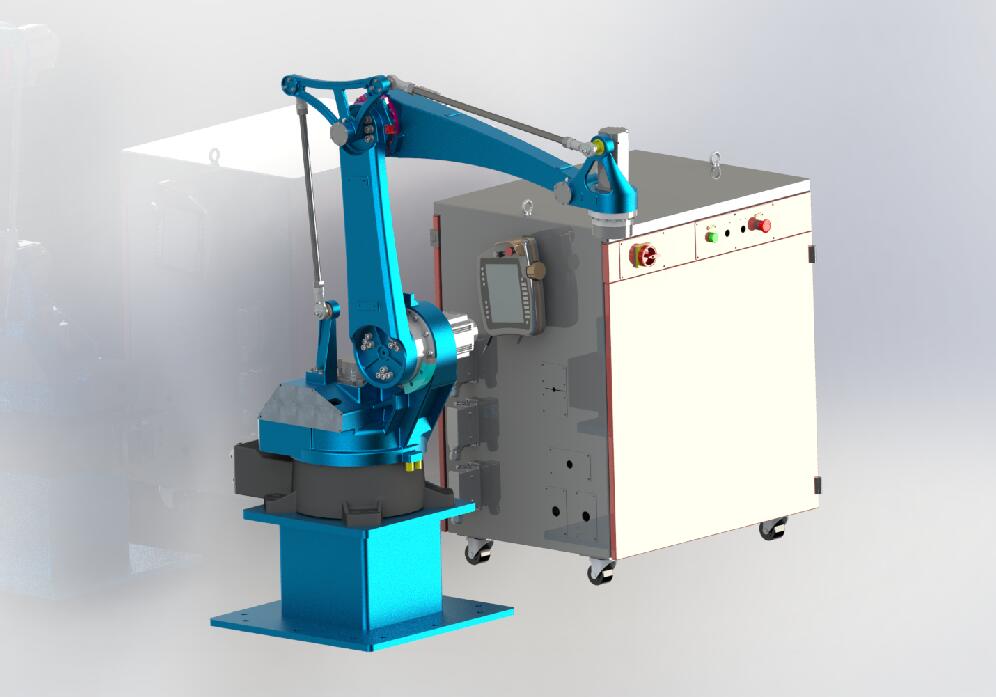
工業(yè)機器人是面向工業(yè)領域的多關節(jié)機械手或者多自由度機器人�,它的出現(xiàn)是為了解放人工勞動力、提高企業(yè)生產(chǎn)效率��。工業(yè)機器人的基本組成結構則是實現(xiàn)機器人功能的基礎�����,看一下工業(yè)機器人的結構組成���。
一���、六軸機械手部分;機械部分是機器人的血肉組成部分��,也就是我們常說的機器人本體部分��。這部分主要可以分為兩個系統(tǒng):
1����、驅動系統(tǒng);要使機器人運行起來�����,需要各個關節(jié)安裝傳感裝置和傳動專治����,這就是驅動系統(tǒng)。它的作用是提供機器人各部分�����、各關節(jié)動作的原動力。驅動系統(tǒng)傳動部分可以是液壓傳動系統(tǒng)��、電動傳動系統(tǒng)���、氣動傳動系統(tǒng)�,或者是幾種系統(tǒng)結合起來的綜合傳動系統(tǒng)���。
2�、機械結構系統(tǒng)�;工業(yè)機器人機械結構主要由四大部分構成:機身、臂部�����、腕部和手部�,每一個部分具有若干的自由度,構成一個多自由的機械系統(tǒng)���。末端操作器是直接安裝在手腕上的一個重要部件����,它可以是多手指的手爪,也可以是噴漆槍或者焊具等作業(yè)工具���。
二���、感受部分����;感受部分就好比人類的五官,為機器人工作提供感覺��,幫助機器人工作過程更加精確����。這部分主要可以分為兩個系統(tǒng):
1、感受系統(tǒng)�;感受系統(tǒng)由內部傳感器模塊和外部傳感器模塊組成,用于獲取內部和外部環(huán)境狀態(tài)中有意義的信息��。智能傳感器可以提高機器人的機動性���、適應性和智能化的水準��。對于一些特殊的信息�,傳感器的靈敏度甚至可以超越人類的感覺系統(tǒng)。
2����、機器人-環(huán)境交互系統(tǒng);機器人-環(huán)境交互系統(tǒng)是實現(xiàn)工業(yè)機器人與外部環(huán)境中的設備相互聯(lián)系和協(xié)調的系統(tǒng)�。工業(yè)機器人與外部設備集成為一個功能單元,如加工制造單元���、焊接單元�、裝配單元等����。也可以是多臺機器人、多臺機床設備或者多個零件存儲裝置集成為一個能執(zhí)行復雜任務的功能單元����。
三、控制部分���;控制部分相當于機器人的大腦部分���,可以直接或者通過人工對機器人的動作進行控制,控制部分也可以分為兩個系統(tǒng):
1��、人機交互系統(tǒng);人機交互系統(tǒng)是使操作人員參與機器人控制并與機器人進行聯(lián)系的裝置����,例如,計算機的標準終端�����、指令控制臺�����、信息顯示板��、危險信號警報器��、示教盒等�����。簡單來說該系統(tǒng)可以分為兩大部分:指令給定系統(tǒng)和信息顯示裝置��。
2��、控制系統(tǒng)���;控制系統(tǒng)主要是根據(jù)機器人的作業(yè)指令程序以及從傳感器反饋回來的信號支配的執(zhí)行機構去完成規(guī)定的運動和功能�。根據(jù)控制原理��,控制系統(tǒng)可以分為程序控制系統(tǒng)����、適應性控制系統(tǒng)和人工智能控制系統(tǒng)三種。根據(jù)運動形式���,控制系統(tǒng)可以分為點為控制系統(tǒng)和軌跡控制系統(tǒng)兩大類�。